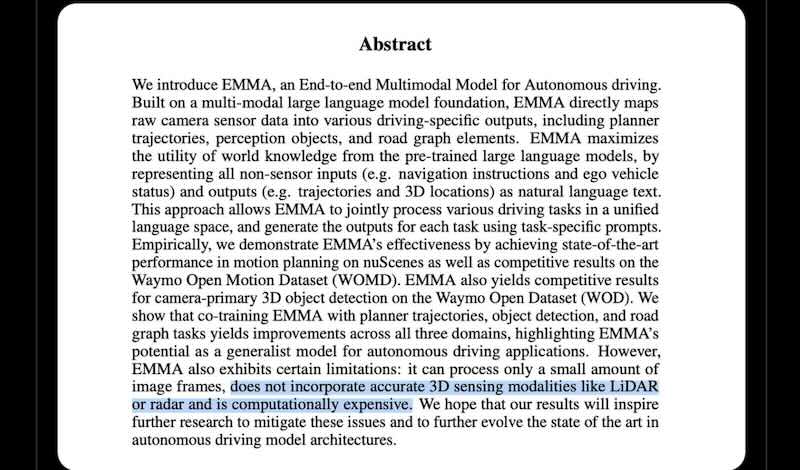
Waymo’s latest breakthrough in autonomous vehicle technology marks a significant shift in how self-driving cars perceive and navigate the world. The company has latest research paper on EMMA, an end-to-end multimodal model that operates solely on camera inputs – a departure from the industry’s reliance on expensive LiDAR systems.
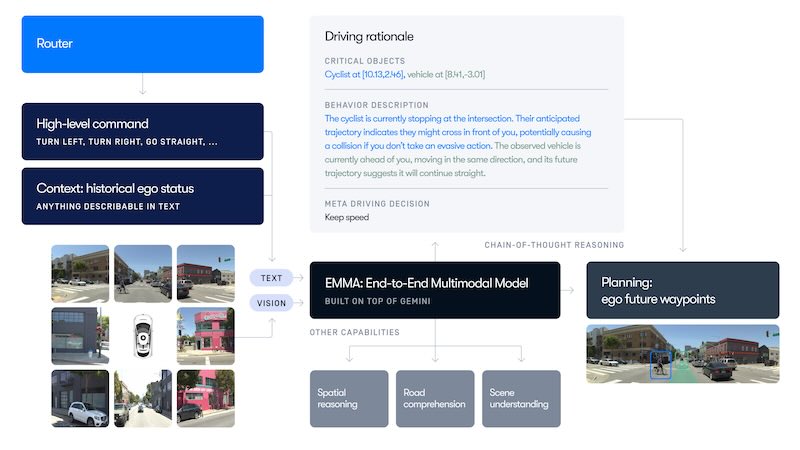
EMMA’s development represents a bold move in autonomous driving technology. By leveraging Gemini’s extensive knowledge base, the system processes visual data and text information to generate driving decisions, from route planning to object detection, all without the traditional laser-based sensing systems.
The numbers speak volumes about Waymo’s confidence in their technology. Their robotaxi service now handles over 21,400 paid trips daily, with their fleet covering an impressive 143,000 autonomous miles each day. These statistics demonstrate the real-world application and reliability of their systems.
What sets EMMA apart is its innovative approach to data processing. The system converts various inputs and outputs into natural language, creating a unified space for decision-making. This integration allows for more nuanced understanding of complex road scenarios.
EMMA employs chain-of-thought reasoning, resulting in a 6.7% improvement in end-to-end planning performance. More importantly, this approach provides clear explanations for each driving decision – a crucial feature for building trust in autonomous systems.
The road ahead isn’t without its obstacles. EMMA currently faces limitations in processing extended video sequences, which affects its real-time reasoning capabilities. The absence of LiDAR and radar integration also presents challenges for certain driving conditions.
Waymo’s research team is focusing on several key areas:
- Developing advanced 3D sensor encoding methods
- Creating more efficient evaluation processes through simulation
- Reducing model inference time
- Ensuring consistency in decision-making steps
This camera-only approach could significantly reduce the cost of autonomous vehicle systems. Traditional LiDAR equipment can add substantial expense to each vehicle, making widespread adoption challenging. EMMA’s success could accelerate the democratization of self-driving technology.
Related Post
Waymo and Uber Partner for Autonomous Rides in Austin, Atlanta
Beyond Lidar: How Tesla Vision-only E2E and MobilEye Radar Are Reshaping Autonomous Driving
Baidu IDG Chief R&D Architect Wang Liang on Tesla FSD V12 and LiDAR vs Vision
Tesla AI Visionary Reveals Roadmap for Self-Driving Cars and Robots