
When it comes to versatility and dexterity, it’s hard to beat the human hand. Our stretchy skin, nimble fingers, and flexible wrists allow us to grip, grab, and manipulate objects of all shapes and sizes with ease. But replicating that biomimetic capability in robotics has proven extremely challenging – until now.
A recently published patent from Tesla details their innovative systems and methods for building a robotic hand and cable-driven fingers configured to mimic human hands and fingers with unprecedented realism, could be a game-changer for humanoid robots like Tesla’s Optimus.
Elon revealed Tesla Optimus real-world tasks via running entirely end-to-end, will sport a new hand later this year packing an impressive 22 degrees of freedom (DOF) – double its current capabilities, “and the actuators will move almost entirely into the forearm, just like how humans work,” Elon says.
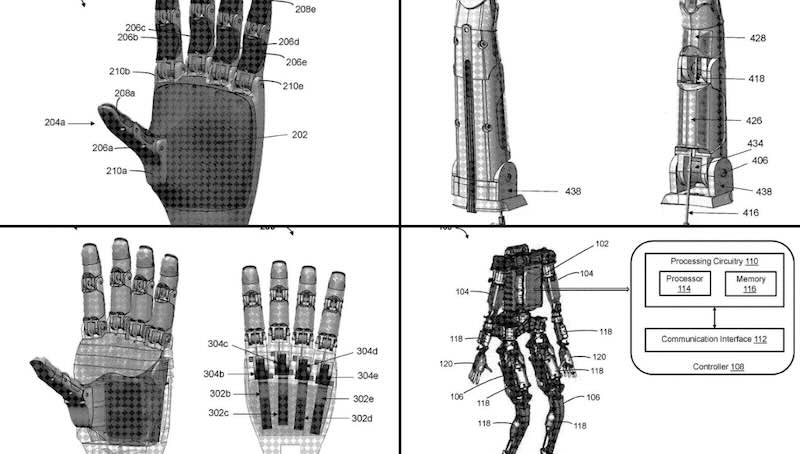
So how does Tesla’s robotic hand work? It’s all about underactuation and clever cable routing.
Instead of using one motor or actuator per finger joint (which gets complicated fast), Tesla’s hand has just six actuators total – two for the thumb and one for each finger. This underactuated system reduces complexity while allowing the robotic digits to flex and extend nearly as fluidly as real human fingers.
The flexing motion is achieved through a network of cables that pull the finger joints. But rather than simply wrapping the cables around joint pivots (the traditional approach), Tesla’s design routes them along the front of the finger bones, ingenious re-routing increases force transmission efficiency between joints.
Other key innovations include using torsion springs to stabilize the joints, terminating the cable ends inside the fingertips without constraints, and implementing magnetic position sensors for precise finger tracking.
The result is a robotic hand that can mimic natural human grasping and manipulation far more realistically than previous designs. It’s a modular system that can scale – the same fundamental cable-driven mechanics could enable anything from a simple three-fingered gripper to an ultra-dextrous five-fingered hand for humanoid robots.
Of course, replicating the incredible versatility of the human hand and arm is an enormously complex challenge that no one has fully cracked yet. But with biomimetic innovations like this, robots may soon be able to get a firm grasp on the physical world like never before. Will Tesla’s Optimus be the first to truly master the human touch?
Related Post: Tesla’s Optimus Gen 2 Robot Ups Agility for More Lifelike Movement