
Waymo dropped something big this week. The Google-owned autonomous vehicle company revealed its world model, built on Google DeepMind’s Genie 3, implications are staggering. While Tesla has been iterating on simulation technology drawn from its production fleet, Waymo just tapped into something fundamentally different: the entire internet. Specifically, YouTube. And that changes everything.
Tesla recently showcased its own approach through a 30-minute presentation by Ashok Elluswamy, VP of Tesla AI. The company generates roughly 500 years of driving data daily from its fleet, what Ashok calls a “Niagara Falls of data.” Tesla’s systems use smart triggers to capture rare corner cases: complex intersections, unpredictable driver behaviors, unusual road conditions. Yet despite this massive collection operation, Tesla faces constraints that Waymo’s world model sidesteps entirely.
Genie 3 represents DeepMind’s most advanced world model to date. According to the lab, it was pre-trained on an internet-scale video corpus dominated by YouTube content. For a world model tasked with understanding the physical world, YouTube is a treasure trove. Billions of hours of footage depicting how objects behave, how light interacts with surfaces, how liquids move. Model has absorbed these physical priors at scale.
But it goes beyond basic physics. Genie 3 demonstrates semantic understanding—meaning it can reason about concepts, not just pixels. Capability unlocks something remarkable: the ability to synthesize scenarios that have never been recorded. Snow falling in June, for instance. Golden Gate Bridge will never see snowfall due to San Francisco’s climate. Yet if the model understands both “a thin layer of snow cover” and the visual identity of the Golden Gate Bridge, it can generate that scene convincingly.
Waymo showcased this capacity with demonstrations that border on absurd. Roads completely submerged during flooding, with furniture drifting through the water. Driving through an active fire, flames consuming both sides of the road. Extreme weather featuring a forming tornado. Palm trees in a tropical setting blanketed in heavy snow, scenes that defy typical climate patterns but remain plausible edge cases.
Demonstrations extended to mechanical failures and obstacles. A vehicle losing control and careening into the woods. A collision with a fallen roadside tree. A broken-down semi blocking lanes. One particularly unsettling scenario featured a car ahead with furniture strapped to its roof, items wobbling precariously as if about to tumble onto the roadway.
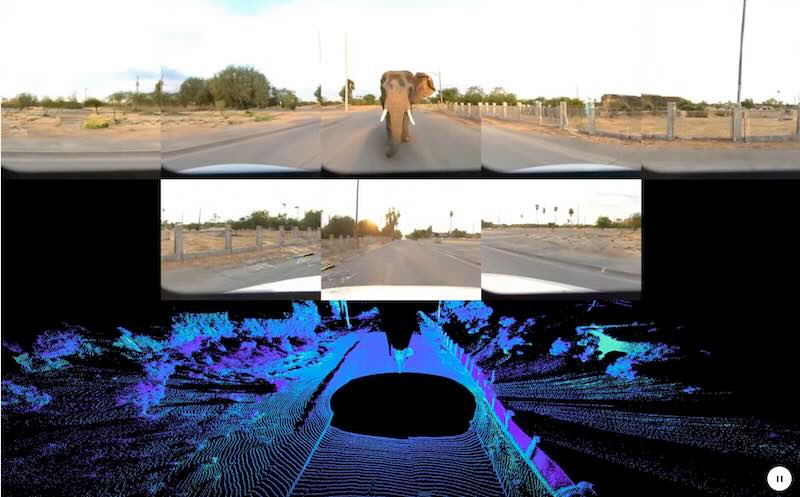
Then there were the animal encounters. An elephant blocking traffic, despite Waymo’s fleet never operating in Africa. A lion. A Texas longhorn. A massive tumbleweed rolling across the road. Someone dressed as a Tyrannosaurus rex crossing the street. Scenarios range from statistically improbable to outright bizarre, yet each represents a potential edge case that an autonomous system might eventually face.
Tesla’s smart trigger system captures corner cases from real-world driving. However, that approach depends entirely on those scenarios actually occurring within Tesla’s operational geography. An elephant in the road? Not happening in North America. A tornado forming directly ahead? Statistically rare even with millions of vehicles collecting data. Waymo’s world model generates these scenarios on demand.
Second breakthrough might matter even more than scenario diversity. Waymo’s world model can generate LiDAR point cloud data from standard video input. Demonstrations showed this dual output clearly—video footage in the upper panel, corresponding synthesized LiDAR in the lower panel. Capability effectively converts YouTube-scale video data into pseudo-sensor training material.
Multi-modal output has always been a DeepMind strength. Fourth demonstration pushed this capability further still. Countless road-trip videos exist on YouTube, recorded with smartphones and consumer dashcams. Waymo’s world model can transform that footage into multi-camera, multi-sensor robotaxi test data with high fidelity.
According to Waymo, the company has introduced the Waymo World Model as “a frontier generative model built on Google DeepMind’s Genie 3 that sets a new bar for large-scale, hyper-realistic autonomous driving simulation.” The company states that by simulating the impossible, engineers can proactively prepare the Waymo Driver for rare and complex scenarios, from tornadoes to planes landing on freeways, before encountering them in reality.
Tesla unveiled its advanced Gaussian splatting system during the presentation, proprietary technology that reconstructs detailed 3D scenes from limited camera views. Unlike standard neural radiance fields or conventional splatting approaches, Tesla’s implementation produces crisp, accurate 3D renderings even from relatively few camera angles. Result is essentially a digital twin of the driving environment that engineers can examine from any perspective.
“This capability transforms how we debug edge cases,” Ashok noted. “We can freeze a moment in time and inspect it from angles the original cameras never captured.”
Represents genuine technical sophistication. Tesla can reconstruct what its cameras captured with extraordinary fidelity. But reconstruction differs fundamentally from generation. Tesla’s Gaussian splatting creates perfect replicas of real scenes. Waymo’s world model imagines entirely new scenes that have never existed, and generates corresponding multi-sensor data for them.
Waymo World Model’s architecture offers controllability through simple language prompts, driving inputs, and scene layouts. Engineers can modify simulations on the fly. System generates high-fidelity, multi-sensor outputs including both camera and LiDAR data. Waymo positions this combination of broad world knowledge, controllability, and multi-modal realism as critical for safely scaling service across new environments.
Tesla’s approach requires the scenario to exist in captured data first. Engineers must wait for the fleet to encounter rare situations, then reconstruct those moments using Gaussian splatting. Waymo’s engineers simply describe the scenario they want—”heavy snow on tropical palm trees with a vehicle losing control”—and the model generates it.
Ashok described Tesla’s challenge as the “curse of dimensionality.” With eight cameras recording at high frame rates, each 30-second driving segment contains billions of tokens of context. Challenge isn’t just collecting information but extracting meaningful patterns from it. Tesla processes 500 years of daily driving data, yet still faces the fundamental constraint that the data reflects only what its fleet has experienced.
Waymo’s world model inverts this constraint. Rather than searching through billions of tokens for rare patterns, engineers generate the exact rare scenario needed. Model’s semantic understanding—trained on YouTube’s vastness, provides the prior knowledge necessary to synthesize physically plausible scenes that Tesla’s fleet may never encounter organically.
Waymo’s world model was not organically grown from Waymo’s production sensor stack. Output runs at 24 FPS and 720P resolution, likely below Waymo’s actual camera specifications. Suggests system-level integration across the full perception-to-control pipeline may not match Tesla’s tight coupling.
Tesla’s system operates at 36 FPS and incorporates sensor-level constraints—camera occlusion, dirt, glare under varying lighting. System is deeply end-to-end, designed specifically for Full Self-Driving closed-loop simulation and reinforcement learning. That tight integration represents a genuine technical achievement.
However, fidelity within known parameters differs from coverage across the possibility space. Tesla can simulate what it has seen with extraordinary accuracy. Waymo can imagine what it has never seen, and generate corresponding sensor data. One approach optimizes for realism. Other optimizes for preparedness.
Access to internet-scale video data creates a compounding advantage. Every dashcam video uploaded, every travel vlog posted, every extreme weather event recorded—Waymo’s world model can potentially learn from it. Data moat grows automatically, fed by millions of content creators who have no idea they’re contributing to autonomous vehicle training.
Tesla’s data comes exclusively from its fleet. Fleet is large and growing, yes. 500 years of daily driving data represents an impressive collection operation. But it operates within geographic and climatic boundaries. Waymo just bypassed those boundaries entirely by training on the internet’s collective visual knowledge.
Tesla’s philosophy centers on learning from real-world driving at scale. Capture everything, reconstruct perfectly, extract patterns. It’s empirical, grounded, tightly coupled to production hardware. Waymo’s philosophy embraces synthetic possibility. Learn physical and semantic priors from internet-scale video, then generate scenarios on demand. It’s imaginative, flexible, decoupled from hardware constraints.
Neither approach is inherently superior for all purposes. Tesla’s method likely produces higher-fidelity simulations of common driving scenarios. Waymo’s method likely provides better coverage of the infinite long tail of rare events. Question is which matters more for achieving safe, scalable autonomy.
Waymo’s revelation suggests the company has found a way to train on scenarios that may never appear in Tesla’s dataset—no matter how large that dataset grows. An elephant blocking the road in San Francisco. A plane making an emergency landing on a freeway. A tornado forming directly in the vehicle’s path. Events exist in video somewhere on the internet. Waymo can learn from them. Tesla cannot, unless its fleet happens to encounter them.
That asymmetry could prove decisive. Autonomous systems fail on edge cases—the scenarios training data inadequately covered. Waymo just gained access to edge cases that exist only in imagination and internet footage. Tesla remains constrained by what its fleet can physically encounter and record.
The race for autonomous dominance just shifted. Tesla has the production scale and the Niagara Falls of data. Waymo has the world model—and all of YouTube behind it.
Related Post
Waymo Robotaxi Show 81% Fewer Crashes Than Human Drivers | New Safety Report
Waymo EMMA End-to-End Multimodal Model for autonomous driving, Without Laser-based Sensing
Tesla FSD Hits 1.1M Users as Subscription Model Takes Over, 120 EFLOPS of Compute Power